
目次 [ Contents ]
カメラスタビライザーの調整方法を調べると、“スタティックバランス”と“ダイナミックバランス”という言葉が出てきます。“スタティックバランス”は「静的な均衡」で「重心」を捉える事です。所謂、ヤジロベー的な部分の調整で、その方法はWeb上で数多く解説されています。
対して“ダイナミックバランス”は探すと出てくるものの、理解できる解説が見つけられません。
長らく謎のキーワードでしたが、自分なりの結論を出したので、自己流の理屈と調整方法について書いていきたいと思います。あくまでも持論であり、きっちりとした科学的・数学的裏付けが有るわけではないのでご了承を。
ダイナミックバランスとは
ちゃんとした説明が見つからないと書きましたが、実は明確な解説があります。
しかし…訳がわかりません。自分は計算式が出てくる最初の段階で断念しました。恐らく、これを理解できるのは「理系語」で話せる人間でしょう。
そこで自力の考察で、ダイナミックバランスの意味を探っていきます。
テコの原理
カメラスタビライザーのスタティック(静的)バランスはテコの原理に沿って調整されます。
例えば同じ重さのものが軸(支点)から同じ距離に配置された状態にあるとします。
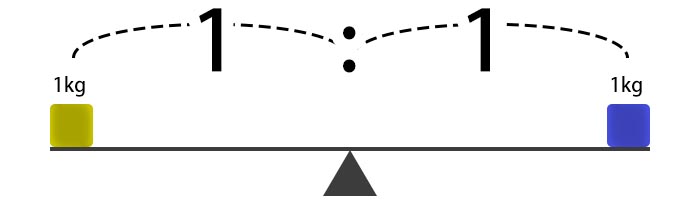
これは「静的にバランスが取れた」状態と言えます。そして「動的(ダイナミック)にもバランスが取れた」状態です。
次に以下のような場合。
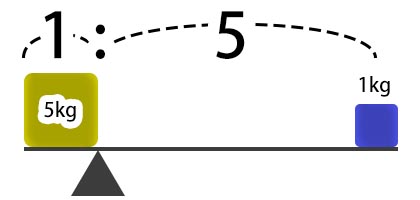
テコの原理で釣り合いが取れ、結果的にこちらも静的にバランスが取れています。しかしながら、動的なバランスは崩れてしまっています。
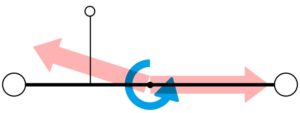
どういうことか?回転させると見えてきます。 例えば、軸を中心に30度ほど回転させると、
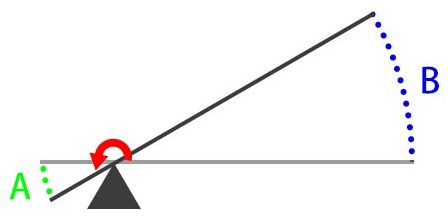
AとBは弧の長さ、「移動距離」が違います。これは、それぞれ回転軸からの長さが違う、つまり、回転半径が違うからです。
ところが、一枚の板(1つの物体)上で回転させているので、AとBの「動いている時間」は全く一緒。つまり、この状態で回転させた場合、二つの錘は「移動速度」が違うということになります。
距離÷時間=速度
ということは、両サイドに掛かる加速度(回転運動なので遠心力?)が違うわけなので、その差によって均衡が崩れるハズです。
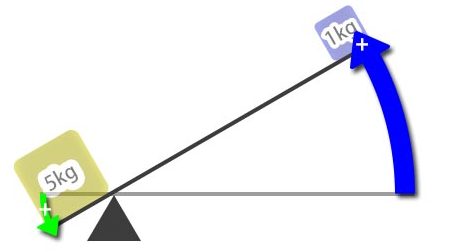
つまり、静止している時はたとえ均衡が取れていても、動けば(回れば)それが当てはまらなくなる状態。これが「ダイナミックバランスが崩れている」という事ではないかと。
現実に当てはめると
この理屈を元に実際のカメラスタビライザーに当てはめて考えると、スレッドの錘部分(ジンバルより下)はシンメトリーで、ほぼ静的・動的にバランスが合っている状態になっています。

しかし、
上に載せるカメラはバッテリーやらレンズやら重さの密度が異なるものが偏って配置されているので、シンメトリーとは言えません。というか構造的に、完全対称な形状・重さのカメラなんて存在しないでしょう。
と言うことは、基本的にカメラの「重心」はテコの原理で結果的に釣り合いが取れた位置であり、「ダイナミックバランスの程よい位置」は別にある、ということになります。もっと言うと、「載せるカメラ(装備)でダイナミックバランスの位置は変わってくる」という結論に至ります。

この理屈からすれば、ダイナミックバランスが崩れていると、カメラスタビライザーがちょっと動いた時、移動エネルギーの偏りによって助長され、更に回ろうとするハズです。それを抑えようと押さえつけるのでグラグラした映像になり、よくある「直進性が出ない」という話になるのではないか、と。
「重心をしっかり合わせる」というのは、テコの原理による「スタティックバランス」の調整でしかなく、この「ダイナミックバランス」とは全然違う話なので、おそらく、いくら時間をかけて重心だけを追い込んでも「狙い通り」にはならないだろうと思っています。
調整方法
では、どうやってこの「ダイナミックバランス」の問題を回避するか?
一番明快で単純な解決策は、全く同じ製品(カメラ)を2つ用意して対称にしてしまうことです。同じセッティングでシンメトリーにして搭載すれば、確実にそういった煩わしさは無くなります。

ただ、これはあまりにバカらしくて現実的ではありません。
次に考えられるのは、スマホやアクションカム、或いはコンデジみたいな「ほぼ厚み(体積)、重さのないもの」を使う方法です。そういった類のものであれば、「ダイナミックバランス」の偏りを最小限にでき、錘部分が持つ慣性モーメントで相殺しやすくなります。
だたし、これも上下間(錘とカメラ)のバランス関係を揃えるのにちょっと苦労します。それに、やはりデジタル一眼レフを使いたいという欲もあり…。
そこで、希望の装備でも、何となくダイナミックバランスを整えられるような方法を考えてみました。
ダイナミックバランスの見方
ダイナミックバランスを合わせる前に、まず状態を知る必要があります。
よくスレッドをクルクル回して、ダイナミックバランスが合っている事を見せている動画があります。
でも、これは最終的な結果確認でしかなく、「どう修正していけばいいのか」は全く分かりません。
自分はこの方法で確認しています。
チャプター「Dynamic Balance」に説明があります。
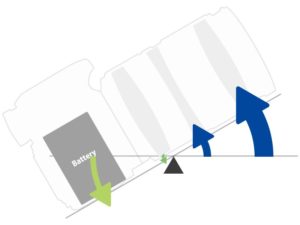
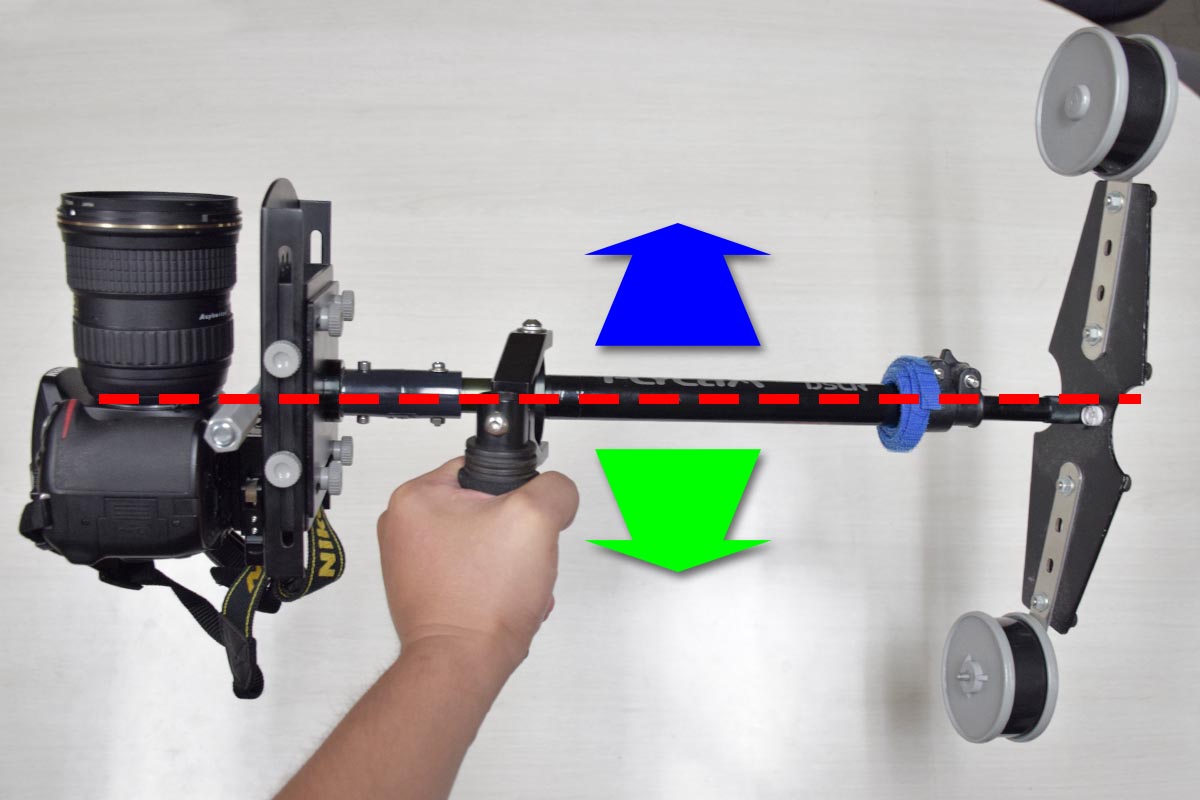
方法は単純です。ドロップタイムを見るのと同じで、スレッドを真横にして落ちていく状態を確認します。だたし、この時見るのは、落下時間ではなく、スレッドの回り方。即ち、倒れていく時に、如何にスレッドが真っ直ぐ動くかを確認すればいいのです。
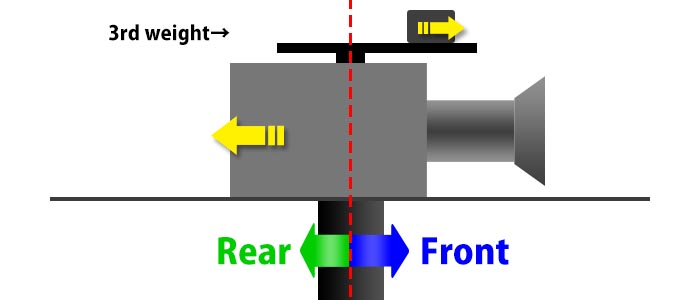
ポールを中心として前後と考え、お尻が先に落ちればダイナミックバランスは「後ろ寄り」、頭が先に落ちれば「前寄り」に偏っている、という事になります。
ただし、前提として「ドロップタイム」があること。そして、「スタティックバランス」が合っていないと意味がありません(ここが初心者にはキツイところです)。
第3の錘
例えば、前方が先に落ちていたら、カメラを後ろにずらします。こうすることで、ジンバル(回転軸)を中心に、前方の重量が減り、後方が増加するので、回転運動による総エネルギー量の割合が変わってきます。
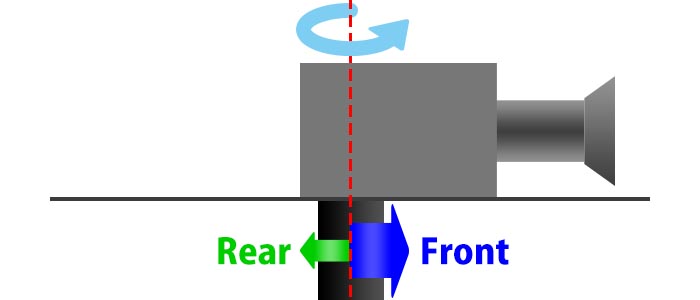

と、これに疑問を抱いた方、その通りです。これだとスタティックバランスが狂っただけで意味がありません。
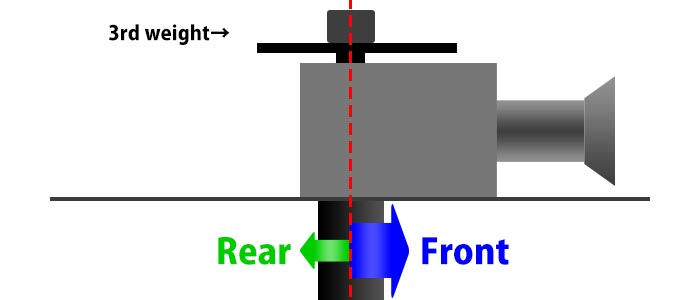
そこで、考えたのが「第3のおもり」を使う方法です。
軽めで、1次元上に移動できる「何か」を予め一緒に載せておき、「ダイナミックバランス」用にずらして狂った「スタティックバランス」の帳尻合わせする、というやり方です。言い換えると、「第3のおもりでスタティックバランスの再調整する」ことになります。
こうして、帳尻が合った状態で、再度ダイナミックバランスを確認し、まだ回転落下するようであれば、同じ工程を繰り返す。これで少しずつダイナミックバランスの偏りを追い込んでいきます。
これを踏まえると、何をしようとしているか理解してもらえると思います。
注意点
第3のおもりは「軽め」というところが大事です。スタティックバランスの帳尻合わせをすると、ダイナミックバランスも影響を受けることになりますが、そのズレも最小にとどめることが出来ます。自分は手頃なものがなかったので、とりあえずカメラシューにつけるエクステンダー的なものを使っています。ただ、これは自分の装備の場合の話なので、どの程度の軽さかは環境によって変わってくるかと思います。
また、「1次元上に動かす」ことも大事かと思います。冒頭で紹介した“ダイナミックバランス入門”では、
すべてのコンポーネントが前後方向の1つの垂直面上に揃うようにします。つまりスレッドの横にコンポーネントを付加しないということです。
これはつまり、直線上から外れたところに物体を置いてしまうと、「計算が物凄く面倒」になるからだと思います。
ただ、結局カメラも3次元の物体なので、厳密に言えば、前後左右の2軸分(もう1つの軸はドロップタイムで均衡を放棄しているので)を考慮して調整する必要があるんじゃないかなと思っています、検証はしていませんが…。
と、ここまで書いておいてなんですが、おそらく完璧な「ダイナミックバランス」を得ることは難しいと思います。こういった物理法則は累乗計算が基本。つまり速度が速くなるほど差が大きくなるハズなので、精度を求めるとキリがなくなります。
カメラスタビライザーの「ダイナミックバランス」は“合わせる”と言うより、実用的な回転速度の中で“程よい塩梅を探す”調整なのかなと思います。
参考リンク
- takobeya.com – ダイナミックバランス入門
- 理基礎 – てこ・天秤・バネ