目次 [ Contents ]
一言で言えば、AR-FOCUSはArduinoにある標準ライブラリでサーボモータを動かしているだけのものです。それに自分が「こう使いたい」と思う実用面を重視して、フォローフォーカスとして使うのに便利であろう設定や、機能をなるべく織り込んでいます。
設計図
この設計は有線で操作する「Wired version」ですが、なるべく最小限のパーツで簡単に実装できるような形にしました。
電気に関しての知識が乏しいので、回路図に関しては「違うよ」って突込みがあるかもしれません。身近な理系の友人に助けてもらってください。
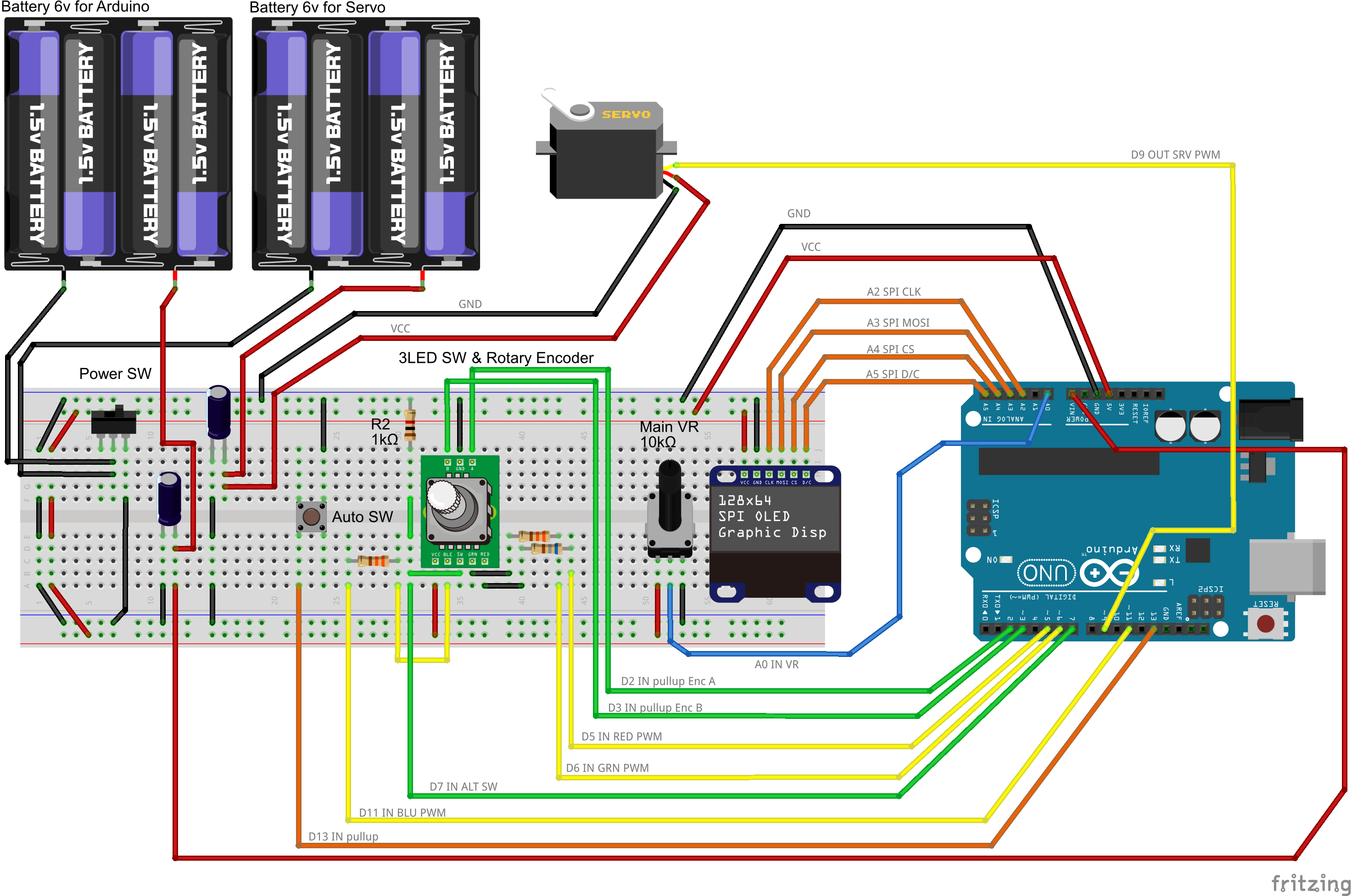
概要図
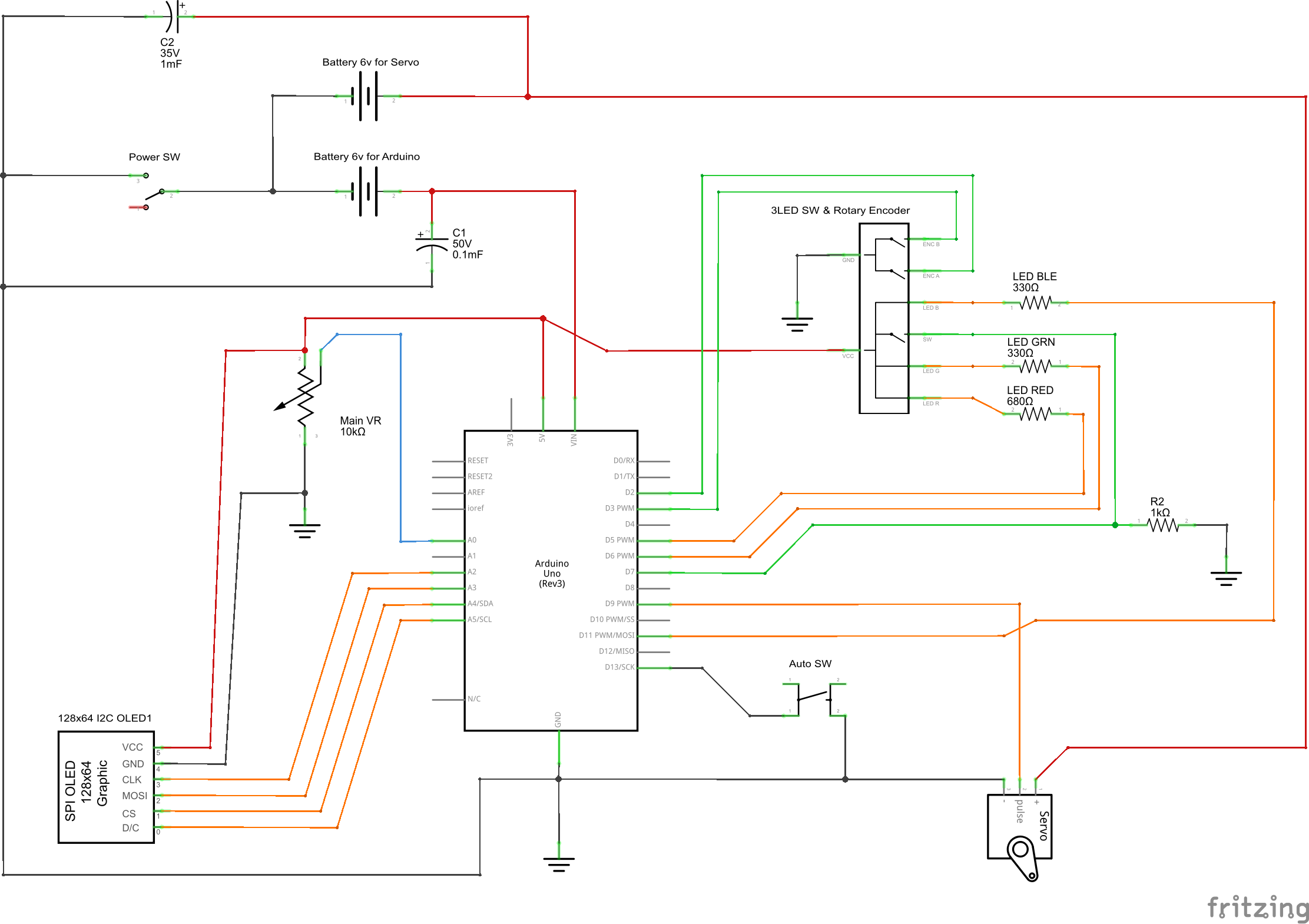
回路図
使い方説明ビデオ
構成パーツ
Arduino
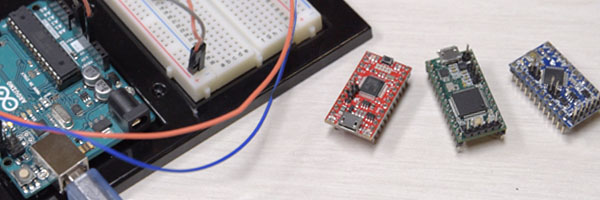
互換機でも動くと思いますが、スケッチを書き込むには30KB以上の領域が必要。ブートローダでプログラム領域を多く削られているようなタイプのマイコンは容量オーバーする場合があるので気をつけて下さい。スケッチの半分以上がグラフィックなので、そこをもっとコンパクトに修正できるなら入るかもしれないですけど、今の時点ではこれが限界かなと。
他に機種を選ぶのに気をつけて欲しいのは、u8glibの対応です。これはグラフィックディスプレイへ描画するのに使っているライブラリなんですが、UNO、promini以降のチップ、いわゆるM0系の機種だとI2Cがうまく動いてくれないみたいです。
あと、スケッチは基本的にdelay関数を使わないで書いてるので、クロックが高い機種ほどレスポンスが良くなるはずです(多分)。もし、ボリュームやエンコーダの反応が悪ければ機種を変更してみるといいかもしれません。
確認済みマイコン
サーボモータ

標準ライブラリで扱えるものはなんでもいけると思うので、予算と、可動スピード、トルクなどのスペックで相談しながら選んでください。
ただ、安いやつはそれなりになので、よく考えて選んだほうがいいでしょう。
ダメなやつはずっとジイジイ言ってたり、誤作動します。

オススメはFutabaのRS304MD。これは基本シリアルサーボですが、PWMでも扱えます。性能の割にお手頃な価格です。300度回るし、反応がよく動作音も静かです。ただ固定金具などのパーツを合わせるとそこそこ高くつきます。
Amazon.co.jp
秋月電子
Futaba RS304MD
OLED(SPI)ディスプレイ
128×64のスクリーン想定でスケッチを作っています。ATmegaならI2Cでもイケる場合がありますが、u8glibが一部のマイコンでうまく動かなかったので、不安な人はSPI接続のディスプレイにしてください。
可変抵抗器

フォーカスを動かすためのメインパーツです。
なんでも動くと思いますが、自分は10kΩを使用。
3colorLED&スイッチ付きロータリーエンコーダ

3色LEDとALT用スイッチ、ロータリーエンコーダがセットなっているパーツです。
秋月電子、スイッチサイエンスなどで手に入ります。このパーツは5V駆動なので、マイコンの選択も考慮してください。
入手が難しければ、エンコーダ、スイッチ、LED、と別々に用意しても使えますが、プルアッププルダウン変更で論理反転が必要になる場合があります。その場合スケッチを一部書き直してください。ディスプレイがちゃんと出ればLEDは必須ではないです。光ってたほうがすぐ確認できて分かりやすいのと見栄えがいいってだけなので。
スイッチ(AUTO MOVE用)

AUTO MOVE用に使うスイッチ。モーメンタリであればなんでもOKです。
コンデンサ / 抵抗
図ではarduino用に100μF、モータ用に4700μFをつけていますが、計算して出したのではなく、なんとなくです。電気のリザーブタンクとして考えてつけているので、モータ用にはなるべく大きいのをつけるといいかもしれないです。
抵抗はLED用に赤680Ω、緑330Ω、青330Ω。ALT SWのプルアップとして1kΩ。これも深く考えずにつけているので、あくまで参考に。Arduinoの駆動電圧、LEDの消耗など考慮して自分なりにやってください。
電源

1.5voltを4本だけでもとりあえず動くとは思いますけど、モータの電流消費が大きいので、長時間は使えないと思います。なので、回路図では4本づつとしてます。
2A出るUSBバッテリなら容量によってはひとつで賄えるかもしれません。
自分で調べてみてください。
電源用スイッチ

シーソー式のスイッチです。電源をオンオフのためものなので、端子の抜き差しとか別の方法で代用して省略してもいいかもしれません。
その他
固定用器具

フォローフォーカス自体を固定する器具、それと出来上がったコントローラを収めるケースなどが必要ですが、ここは各々の工作、工夫次第です。
ローラー

サーボモータの駆動をレンズに伝えるのに車輪的なものが必要です。
タミヤのプラモタイヤが比較的簡単です。
ただ、レンズの直径と車輪の直径はなるべく近いサイズにする必要があります。

サーボモータは大抵180度なので、車輪が小さいと円周距離が足らなくてレンズの可動範囲をカバーできなくなるからです。
また、ゴムの接地だけだとどうしても滑るので、ギヤを噛ませる形にする方が安心です。

自分も最初ギヤレスを目指してましたが、歯車でないとズレてしまうんですよね。